OpenAI Gym An Introduction
Official Docs: http://gym.openai.com/docs/
Github: https://github.com/openai/gym
Installation
Simply install
gymusingpip3:pip3 install gymFull installation containing all environments
pip3 install gym[all]
You can ignore the failed building message ofmujoco-py, which needs a license.
Environment
Check all environment in gym using:
print(gym.envs.registry.all())print([env.id for env in gym.envs.registry.all()]) # list version
['Copy-v0', 'RepeatCopy-v0', 'ReversedAddition-v0', 'ReversedAddition3-v0', 'DuplicatedInput-v0', 'Reverse-v0', 'CartPole-v0', 'CartPole-v1', 'MountainCar-v0', ...
Basic Usage
Take “CartPole-v0” environment as an example:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15import gym
import time
env = gym.make("CartPole-v0") # setup a environment for the agent
initial_observation = env.reset()
done = False
# one episode, when done is True, break.
while not done:
env.render() # make the environment visiable
action = env.action_space.sample() # randomly select an action from total actions the agent can take
next_observation, reward, done, info = env.step(action)
time.sleep(0.1) # for better display effect
env.close() # close the environment
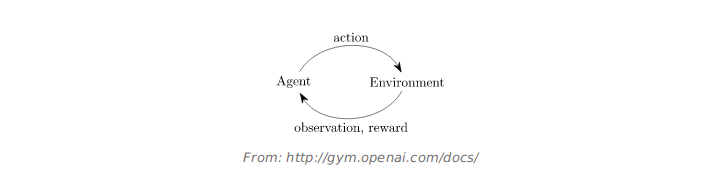
Here, the agent is a random agent that just take a random action in each step. You can change it as a linear agent or a neural network agent which accept the observation and return an action not randomly select from the action space.
Note, env.step(action) that takes an action and returns four different things:
- observation (object): an environment-specific object representing your observation of the environment.
- reward (float): amount of reward achieved by the previous action.
- done (boolean): whether it’s time to reset the environment again.
- info (dict): diagnostic information useful for debugging.
Spaces
(Just copy from the official docs. Still take “CartPole-v0” as example.)
Every environment(discrete) comes with an action_space and an observation_space. These attributes are of type Space, and they describe the format of valid actions and observations:1
2
3
4
5
6import gym
env = gym.make('CartPole-v0')
print(env.action_space)
#> Discrete(2)
print(env.observation_space)
#> Box(4,)
The Discrete space allows a fixed range of non-negative numbers, so in this case valid actions are either 0 or 1. The Box space represents an n-dimensional box, so valid observations will be an array of 4 numbers. We can also check the Box’s bounds:1
2
3
4print(env.observation_space.high)
#> array([ 2.4 , inf, 0.20943951, inf])
print(env.observation_space.low)
#> array([-2.4 , -inf, -0.20943951, -inf])
Box and Discrete are the most common Spaces. You can sample from a Space or check that something belongs to it:1
2
3
4
5from gym import spaces
space = spaces.Discrete(8) # Set with 8 elements {0, 1, 2, ..., 7}
x = space.sample()
assert space.contains(x)
assert space.n == 8
For CartPole-v0, one of the actions applies force to the left, and one of them applies force to the right.